The SediMeter system for sediment monitoring
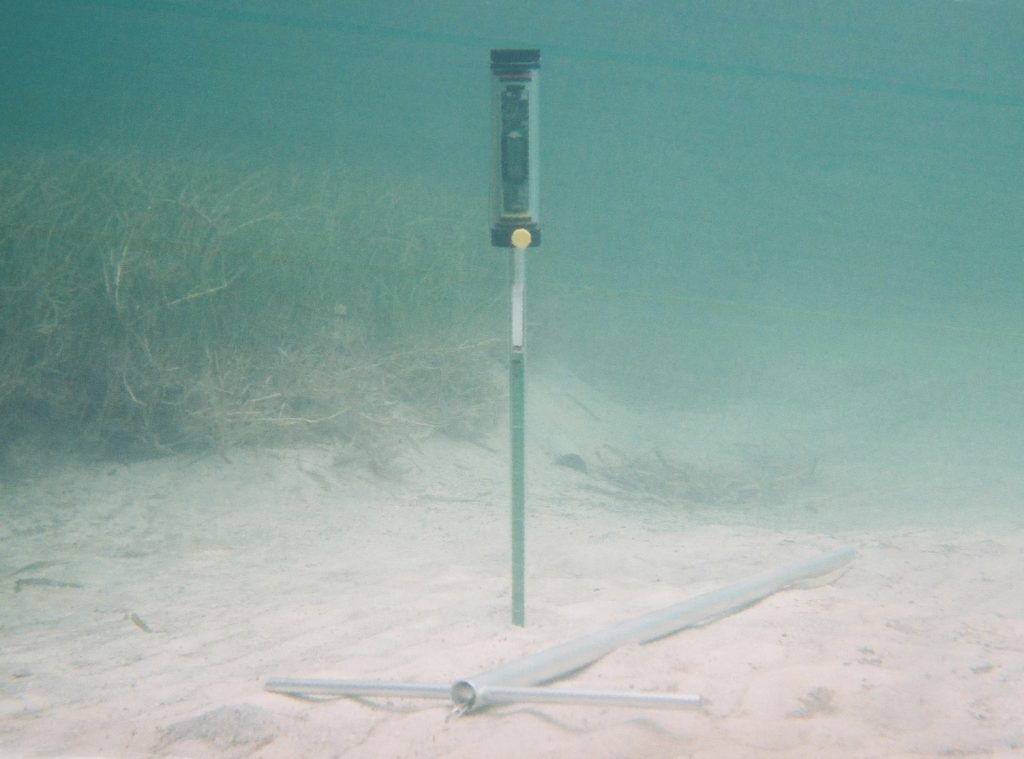
The SediMeter™ is a patented instrument for measuring siltation, sedimentation, erosion, siltation, and other sediment conditions, with high temporal and spatial resolution. Originally invented in 1985 for studying coastal sediment transport, we have refined it with environmental monitoring in mind since 2006.
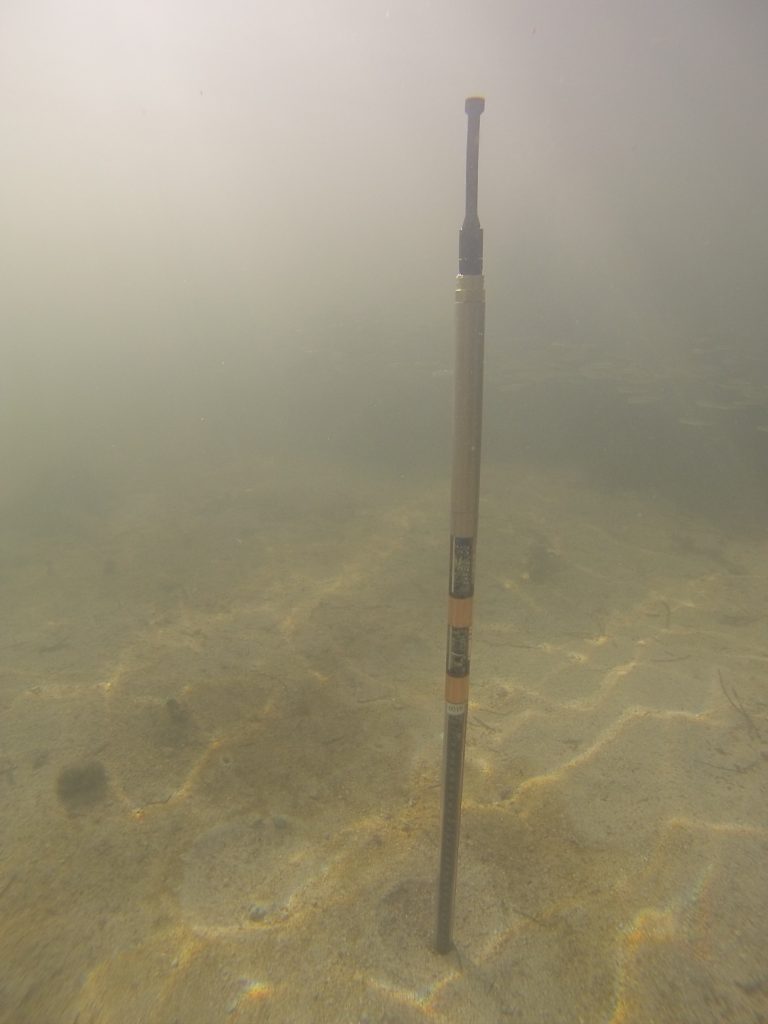
Our sediment monitoring system consists of two versions of the SediMeter instrument, each integrating a variety of sensors apart from the SediMeter sensor per se. One of the two versions doubles as a free-fall sediment penetrometer, a profiler that we call SediSond and the first prototype of which we made in 1995.
The system also consists of the SediTrans instrument for suspended sediment transport monitoring. It consists of a tilt current meter combined with a turbidimeter and some other sensors.
For real-time monitoring the instruments can be connected by cables or by radio telemetry, using the SediLink radio modem (see pdf files).
Turbidity measurements must be converted to suspended sediment concentration (SSC) values and for that purpose we offer the Nilsson Depth-Integrating Suspended Sediment Sampler.