At present we at Lindorm offer two different SediMeter™ models, that differ only in the mechanical hardware. Refer to these pdf files for further details.
SM4
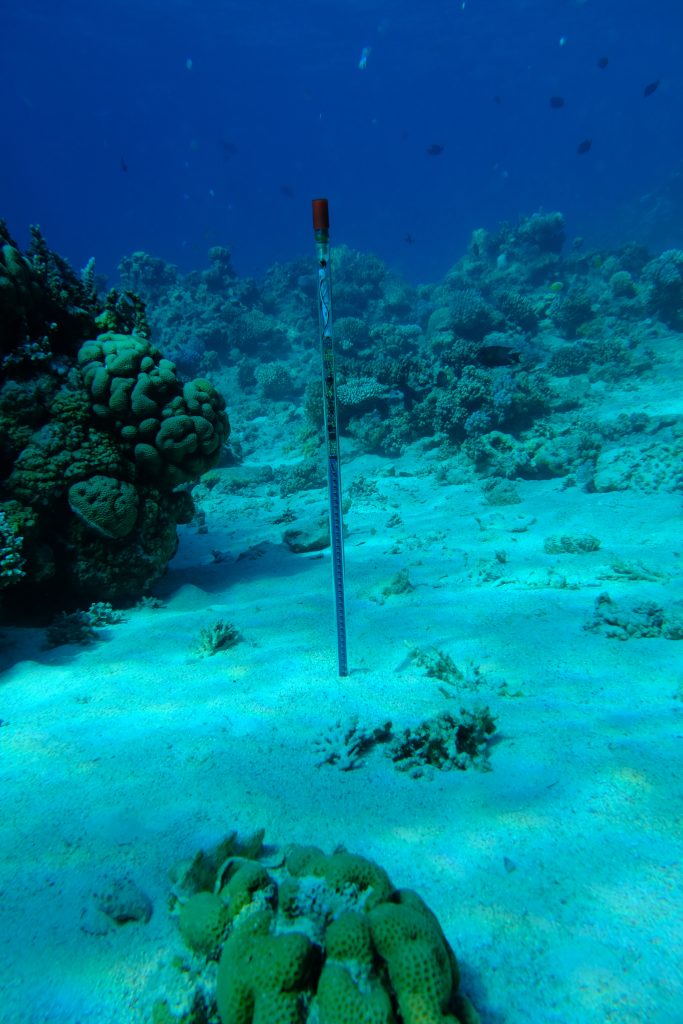
The SM4 model has a 15 mm diameter level sensor that goes into the holder tube, and a 20 mm diameter turbidimeter region that stays free of the holder tube. The battery house is designed to avoid galvanic corrosion and to have a natural antifouling property. The SM4-kit includes a screw anchor and holder tube intended for sand and finer sediments.


SM4P
The SM4P model has 20 mm diameter throughout. It is intended to be used without a holder tube. Instead, the user would typically mount it to a platform or tripod. It is physically stronger than the SM4. It sits in a straight tube, threaded in each end, and this tube can be easily replaced at factory. The SM4P-kit includes a brass tip intended to be pushed or gently hammered down in soft sediments. The SM4P also works as a SediSond with optional hardware.
Features of the SediMeter™
The Principle
The SediMeter™ sensor was invented by Dr. Ulf Erlingsson in 1985 for detecting incipient sediment motion on the seafloor. It consists of a vertical array of optical backscatter detectors (OBS), or reflex detectors, operating in the near infrared band of the spectrum so as to become virtually immune to daylight under water. The data is plotted in the software as a “time scan,” with time on the X axis and the Z level on the Y axis. Algorithms both in the instrument and in the software search for the bed level using an edge detection algorithm on this data. In 2006 we at Lindorm, Inc. started developing the 2nd generation SediMeters, the SM2, and since then all SediMeters have had 36 OBS detectors.
The Modern Sensor
The sensor consists of 36 near infrared optical backscatter detectors (NIR OBS) spaced 1 cm apart. Turbidity is measured at 71 levels, 36 as straight backscatter and 35 as oblique backscatter (e.g. emitted from #1 and measured at #2). When viewed in false color, the brown, beige and gray tones denote buried detectors with differing sediment characteristics, while black denotes clear water and blue represents air. The bed level is estimated with 0.01 mm resolution.
Trubidimeters etc
About 11 cm higher up there are two turbidity sensors, one ISO style turbidity meter with NIR light, and one EPA style turbidity meter with white light, both reflected 90 degrees. There is also a fluorescence meter emitting UV light and measuring the returned white light. The window of the turbidimeters are protected against fouling by those same UV LEDs.
Accelerometer
The 4th generation SediMeter also has a 3D accelerometer for measuring tilt, but the real benefit is only realised in rev. 2 of the firmware that came in 2024. The accelerometer has its own CPU that can trigger a measurement based on user-defined criteria, which can be either vibration, free-fall, or both. In burst mode, the accelerometer can be synchronised so it collects continuous data at up to 400 Hz during many seconds. The accelerometer is central to the new SediSond mode of SM4P, and it is also possible to listen to the data, even in stereo.
Data Management
All SediMeter SM4 models have a built-in memory that holds 32,786 records. The SediMeter SM4 and SM4P can be used stand-alone, or connected in a network of up to 255 units. Measurements can be initiated over the network, by the internal clock, or by the accelerometer, which can be set up to trigger as a result of vibrations, or due to free-fall. The internally timed logging interval is from 1 seconds to 24 hours.
High-Frequency Sampling
From 2024, the SM4 can take burst samples. Each measurement can be a single record, or up to 255 records in a burst. Bursts can have a rate from 0.125 Hz to 20 Hz (at rates over 1 Hz, some sensors and dropped or sped up). The accelerometer is synchronised to the bursts in 10-bit mode, allowing continuous 3D accelerometer data to be gathered at up to 400 Hz — including the triggering event and up to 20 samples prior. Bursts can be turned on for either timed or triggered measurements independently. At the end of each measurement, the last record is automatically transmitted over cable, if connected, which provides the best of both worlds: Data storage internally for safety in case the communication is lost, and real-time data for monitoring.
The 4th Generation
The 4th generation SediMeter™, launched in 2018, added a range of new sensors and features:
- ISO 7027-conforming and EPA 180.1-compliant nephelometric turbidimeters
- Fluorescence sensors
- Luxmeter, visible light sensor
- Accelerometer
- UV anti-fouling
In 2024, rev. 2 of the SM4 introduced these new features, essentially making in generation 4.5:
- Burst sampling at up to 20 Hz, with up to 255 samples per measurement
- Configurable accelerometer and sampling triggered by vibration and or free-fall
- SediSond sediment profiling mode (only SM4P)
The Origin
The original functional SediMeter™ prototype built by Ulf Erlingsson in 1985 had 16 OBS detectors controlled by a Z80 NMOS CPU. It measured the reflection using an 8-bit A/D converter and stored data on a 2 kB RAM chip. The lab test immediately became a success. The sensor was able to detect incipient sediment motion by reacting to the addition to a single grain of sand adjacent to the sensor. A small series of instruments were built with a CMOS processor and successfully deployed in the field work for Erlingsson’s doctoral thesis. He could show that sediment transport on the sea floor regularly occurred at significantly greater depths than previously assumed. The sensor was patented, the novelty being the ability to interpolate between the discreet detectors.